mirror of
https://github.com/anvaka/ngraph.path.git
synced 2026-01-25 15:23:38 +00:00
218 lines
8.0 KiB
Markdown
218 lines
8.0 KiB
Markdown
# ngraph.path
|
|
|
|
Fast path finding for arbitrary graphs. [Play with a demo](https://anvaka.github.io/ngraph.path.demo/) or [watch it](https://www.youtube.com/watch?v=hGeZuIEV6KU) on YouTube.
|
|
|
|
[](https://anvaka.github.io/ngraph.path.demo/)
|
|
|
|
If you want to learn how the demo was made, please refer to the [demo's source code](https://github.com/anvaka/ngraph.path.demo#ngraphpath-demo).
|
|
I tried to describe it in great details.
|
|
|
|
# Performance
|
|
|
|
I measured performance of this library on New York City roads graph (`733,844` edges, `264,346` nodes).
|
|
It was done by solving `250` random path finding problems. Each algorithm was solving
|
|
the same set of problems. Table below shows required time to solve one problem.
|
|
|
|
| | Average | Median | Min | Max | p90 | p99 |
|
|
|----------------------------------------|---------|:------:|:---:|-------|-------|-------|
|
|
| A* greedy (suboptimal) | 32ms | 24ms | 0ms | 179ms | 73ms | 136ms |
|
|
| NBA* | 44ms | 34ms | 0ms | 222ms | 107ms | 172ms |
|
|
| A*, unidirectional | 55ms | 38ms | 0ms | 356ms | 123ms | 287ms |
|
|
| Dijkstra | 264ms | 258ms | 0ms | 782ms | 483ms | 631ms |
|
|
|
|
"A* greedy" converged the fastest, however, as name implies the found path is not necessary
|
|
globally optimal.
|
|
|
|
## Why is it fast?
|
|
|
|
There are a few things that contribute to the performance of this library.
|
|
|
|
I'm using heap-based priority queue, built specifically for the path finding.
|
|
I [modified a heap's](https://github.com/anvaka/ngraph.path/blob/master/a-star/NodeHeap.js) implementation,
|
|
so that changing priority of any element takes `O(lg n)` time.
|
|
|
|
Each path finder opens many graph nodes during its exploration, which creates pressure
|
|
on garbage collector. To avoid the pressure, I've created an [object pool](https://github.com/anvaka/ngraph.path/blob/master/a-star/nba/makeNBASearchStatePool.js),
|
|
which recycles nodes when possible.
|
|
|
|
In general, the `A*` algorithm helps to converge to the optimal solution faster than
|
|
Dijkstra, because it uses "hints" from the heuristic function. When search is performed
|
|
in both directions (`source -> target` and `target -> source`), the convergence can be
|
|
improved even more. The [NBA*](https://github.com/anvaka/ngraph.path/blob/master/a-star/nba/index.js) algorithm
|
|
is a bi-directional path finder, that guarantees optimal shortest path. At the same time it
|
|
removes balanced heuristic requirement. It also seem to be the fastest algorithm, among implemented
|
|
here *(NB: If you have suggestions how to improve this even further - please let me know!)*
|
|
|
|
I also tried to create my own version of bi-directional A* search, which
|
|
turned out to be harder than I expected - the two searches met each other quickly, but the point
|
|
where they met was not necessary on the shortest global path. It was close to optimal, but not the optimal.
|
|
I wanted to remove the code, but then changed my mind: It finds a path very quickly. So, in case when
|
|
speed matters more than correctness, this could be a good trade off. I called this algorithm `A* greedy`,
|
|
but maybe it should be `A* lazy`.
|
|
|
|
# usage
|
|
|
|
## installation
|
|
|
|
You can install this module, bu requiring it from npm:
|
|
|
|
```
|
|
npm i ngraph.path
|
|
```
|
|
|
|
Or download from CDN:
|
|
|
|
``` html
|
|
<script src='https://unpkg.com/ngraph.graph@1.1.0/dist/ngraph.path.min.js'></script>
|
|
```
|
|
|
|
If you download from CDN the library will be available under `ngraphPath` global name.
|
|
|
|
## Basic usage
|
|
|
|
This is a basic example, which finds a path between arbitrary
|
|
two nodes in arbitrary graph
|
|
|
|
``` js
|
|
let path = require('ngraph.path');
|
|
let pathFinder = path.aStar(graph); // graph is https://github.com/anvaka/ngraph.graph
|
|
|
|
// now we can find a path between two nodes:
|
|
let fromNodeId = 40;
|
|
let toNodeId = 42;
|
|
let foundPath = pathFinder.find(fromNodeId, toNodeId);
|
|
// foundPath is array of nodes in the graph
|
|
```
|
|
|
|
Example above works for any graph, and it's equivalent to unweighted [Dijkstra's algorithm](https://en.wikipedia.org/wiki/Dijkstra%27s_algorithm).
|
|
|
|
## Weighted graph
|
|
|
|
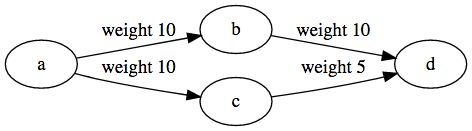
Let's say we have the following graph:
|
|
|
|
``` js
|
|
let createGraph = require('ngraph.graph');
|
|
let graph = createGraph();
|
|
|
|
graph.addLink('a', 'b', {weight: 10});
|
|
graph.addLink('a', 'c', {weight: 10});
|
|
graph.addLink('c', 'd', {weight: 5});
|
|
graph.addLink('b', 'd', {weight: 10});
|
|
```
|
|
|
|
|
|
|
|
We want to find a path with the smallest possible weight:
|
|
|
|
``` js
|
|
let pathFinder = aStar(graph, {
|
|
// We tell our pathfinder what should it use as a distance function:
|
|
distance(fromNode, toNode, link) {
|
|
// We don't really care about from/to nodes in this case,
|
|
// as link.data has all needed information:
|
|
return link.data.weight;
|
|
}
|
|
});
|
|
let path = pathFinder.find('a', 'd');
|
|
```
|
|
|
|
This code will correctly print a path: `d <- c <- a`.
|
|
|
|
## Guided (A-Star)
|
|
|
|
When pathfinder searches for a path between two nodes it considers all
|
|
neighbors of a given node without any preference. In some cases we may want to
|
|
guide the pathfinder and tell it our preferred exploration direction.
|
|
|
|
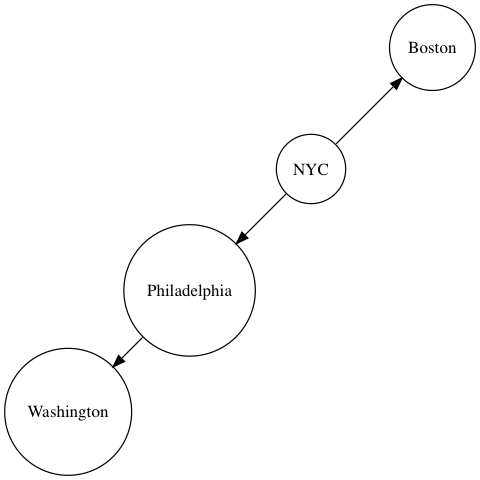
For example, when each node in a graph has coordinates, we can assume that
|
|
nodes that are closer towards the path-finder's target should be explored
|
|
before other nodes.
|
|
|
|
``` js
|
|
let createGraph = require('ngraph.graph');
|
|
let graph = createGraph();
|
|
|
|
// Our graph has cities:
|
|
graph.addNode('NYC', {x: 0, y: 0});
|
|
graph.addNode('Boston', {x: 1, y: 1});
|
|
graph.addNode('Philadelphia', {x: -1, y: -1});
|
|
graph.addNode('Washington', {x: -2, y: -2});
|
|
|
|
// and railroads:
|
|
graph.addLink('NYC', 'Boston');
|
|
graph.addLink('NYC', 'Philadelphia');
|
|
graph.addLink('Philadelphia', 'Washington');
|
|
```
|
|
|
|
|
|
|
|
When we build the shortest path from NYC to Washington, we want to tell the pathfinder
|
|
that it should prefer Philadelphia over Boston.
|
|
|
|
``` js
|
|
let pathFinder = aStar(graph, {
|
|
distance(fromNode, toNode) {
|
|
// In this case we have coordinates. Lets use them as
|
|
// distance between two nodes:
|
|
let dx = fromNode.data.x - toNode.data.x;
|
|
let dy = fromNode.data.y - toNode.data.y;
|
|
|
|
return Math.sqrt(dx * dx + dy * dy);
|
|
},
|
|
heuristic(fromNode, toNode) {
|
|
// this is where we "guess" distance between two nodes.
|
|
// In this particular case our guess is the same as our distance
|
|
// function:
|
|
let dx = fromNode.data.x - toNode.data.x;
|
|
let dy = fromNode.data.y - toNode.data.y;
|
|
|
|
return Math.sqrt(dx * dx + dy * dy);
|
|
}
|
|
});
|
|
let path = pathFinder.find('NYC', 'Washington');
|
|
```
|
|
|
|
With this simple heuristic our algorithm becomes smarter and faster.
|
|
|
|
It is very important that our heuristic function does not overestimate actual distance
|
|
between two nodes. If it does so, then algorithm cannot guarantee the shortest path.
|
|
|
|
## oriented graphs
|
|
|
|
If you want the pathfinder to treat your graph as oriented - pass `oriented: true` setting:
|
|
|
|
``` js
|
|
let pathFinder = aStar(graph, {
|
|
oriented: true
|
|
});
|
|
```
|
|
|
|
## available finders
|
|
|
|
The library implements a few A* based path finders:
|
|
|
|
``` js
|
|
let aStarPathFinder = path.aStar(graph, options);
|
|
let aGreedyStar = path.aGreedy(graph, options);
|
|
let nbaFinder = path.nba(graph, options);
|
|
```
|
|
|
|
Each finder has just one method `find(fromNodeId, toNodeId)`, which returns array of
|
|
nodes, that belongs to the found path. If no path exists - empty array is returned.
|
|
|
|
# Which finder to choose?
|
|
|
|
With many options available, it may be confusing whether to pick Dijkstra or A*.
|
|
|
|
I would pick Dijkstra if there is no way to guess a distance between two arbitrary nodes
|
|
in a graph. If we can guess distance between two nodes - pick A*.
|
|
|
|
Among algorithms presented above, I'd recommend `A* greedy` if you care more about speed and
|
|
less about accuracy. However if accuracy is your top priority - choose `NBA*`.
|
|
This is a bi-directional, optimal A* algorithm with very good exit criteria. You can read
|
|
about it here: https://repub.eur.nl/pub/16100/ei2009-10.pdf
|
|
|
|
# license
|
|
|
|
MIT
|